

 مبدأ
مبدأالروبوت يتجنب العقبات باستخدام الرادار. أنه يقيس المسافة بين العقبة والروبوت ويختار أفضل مسار للسفر.
وهي مجهزة مع اثنين من المحركات التي يتم ضبط السرعة باستخدام الجهد
الكرة المسافة للوصول إلى العقبة هو قابل للتعديل وعرضها على شاشات الكريستال السائل
السائر المحركات الكرة يسمح تناوب الرادار للكشف عن العوائق في الجبهة ، اليمين أو اليسار

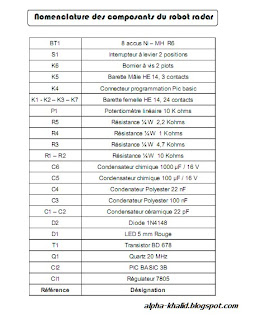
المكونات الرئيسية المتوفرة
Moteur Pas à Pas : Japan sevo
Réf : 80.1893
Module télémètre : SRF04
réf :80.0660-1
Le Pic Basic et l'afficheur LCD chez
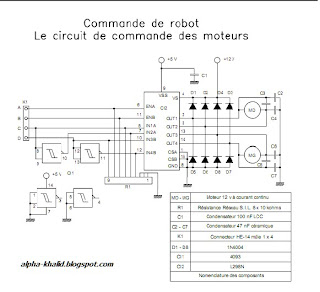
Les moteurs sont des modèles 12 v avec moto- réducteur de 60 tr/min
Réf : 80.1893
Module télémètre : SRF04
réf :80.0660-1
Le Pic Basic et l'afficheur LCD chez
Les moteurs sont des modèles 12 v avec moto- réducteur de 60 tr/min

إعمال الالكترونيات
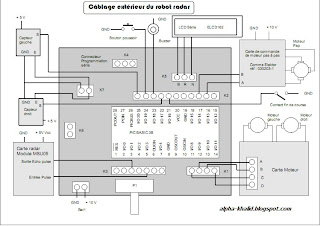
- Le Picbasic commande les cartes et les capteurs.
Un interrupteur poussoir permet d'entrer des commandes
Un buzzer émet des bips
Une carte de commande contrôle le moteur pas à pas
Une carte contrôle les moteurs de propulsion :
2capteurs de position donnent l'angle des roues
 مبدأ
مبدأ
أن تكون مجهزة تمكن الروبوت مدعوم من العاصمة المحركات اثنين للتحرك في خط مستقيم وبدوره قيمة معروفة ، مع ضرورة عجلة موقف الاستشعار. باستخدام جهاز استشعار بصري يمكن تحديد زاوية دوران عجلة من دون لمسه.
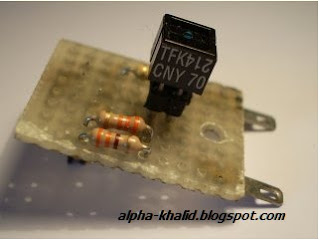 الاستشعار من جزأين ،
الاستشعار من جزأين ،
قرص مع مناطق بيضاء وسوداء
والأشعة تحت الحمراء الصمام الثنائي ومستقبل لها.



 مبدأ
مبدأأن تكون مجهزة تمكن الروبوت مدعوم من العاصمة المحركات اثنين للتحرك في خط مستقيم وبدوره قيمة معروفة ، مع ضرورة عجلة موقف الاستشعار. باستخدام جهاز استشعار بصري يمكن تحديد زاوية دوران عجلة من دون لمسه.
 الاستشعار من جزأين ،
الاستشعار من جزأين ،قرص مع مناطق بيضاء وسوداء
والأشعة تحت الحمراء الصمام الثنائي ومستقبل لها.
 إعمال الالكترونيات
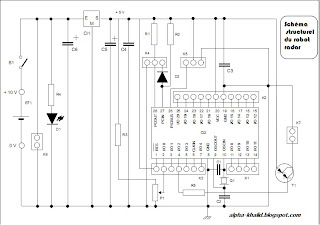
إعمال الالكترونياتمخطط هيكلي أدناه يبين عيوب المبدأ. ويتم التحكم في الصمام optocoupler متحكم بها عن طريق وسيط من البريد مدخلات
وphototransistor من optocoupler إرجاع إشارة إلى متحكم في شكل نبضات من خلال الإخراج s


 تحقيق الجزء الميكانيكي
تحقيق الجزء الميكانيكيويمكن تشكيله القرص مم البلاستيكية بيضاء مع التصنيع باستخدام الحاسب الآلي. أنها تمتلك 6 6 القطاعات القطاعات والأبيض أسود. حلول أخرى ممكنة لصنع هذا القرص.


0 التعليقات:
إرسال تعليق